
Научная статья «Использование нейронных сетей для систем планирования перемещения робототехнических комплексов в сфере задач МЧС» была опубликована в журнале "Проблемы управления рисками в техносфере", № 2 (66)–2023.
Обследование и анализ подводных потенциально опасных объектов (ППОО) с применением группы морских робототехнических комплексов (МРТК) в составе волнового и подводных глайдеров позволяет:
Обследование и анализ подводных потенциально опасных объектов (ППОО) с применением группы морских робототехнических комплексов (МРТК) в составе волнового и подводных глайдеров позволяет:
- выполнять оперативное пространственное 3D обследование области загрязнения;
- формировать уточненные пространственные контуры загрязнения в режиме реального времени;
- строить прогностические модели высокой достоверности.
Кроме того использование технологий резидентного базирования в составе морских мониторинговых обсерваторий в разы сокращает время и стоимость работ, повышая результативность.
Технологии интеллектуальной идентификации и кластеризации способны предоставлять необходимую информацию о месторасположении ППОО и точек возникновения и характере чрезвычайной ситуации, наличии пострадавших. Количество одновременно собираемых параметров позволяет применять нейросетевые подходы и методы машинного обучения для формирования логики внутригруппового взаимодействия и планирования как однородной, так и разнородной группы роботов.
Программно-имитационный комплекс на основе ROS, Rviz, Gazebo и библиотек машинного обучения моделирует сценарии применения МРТК в решении задач обнаружения, патрулирования и мониторинга ППОО с последующей программно-аппаратной отработкой и верификацией на имеющихся макетах мини катеров, автономных необитаемых подводных аппаратах и других образцах РТК.
Успех выполняемых работ обусловлен устойчивой связью между агентами МРТК. За связь и навигацию в подводной среде отвечает комбинированный гидроакустический модем с ультракороткой базой разработки и производства СПбГМТУ, в воздушной среде связь реализована через Wi-Fi и Lora каналы.
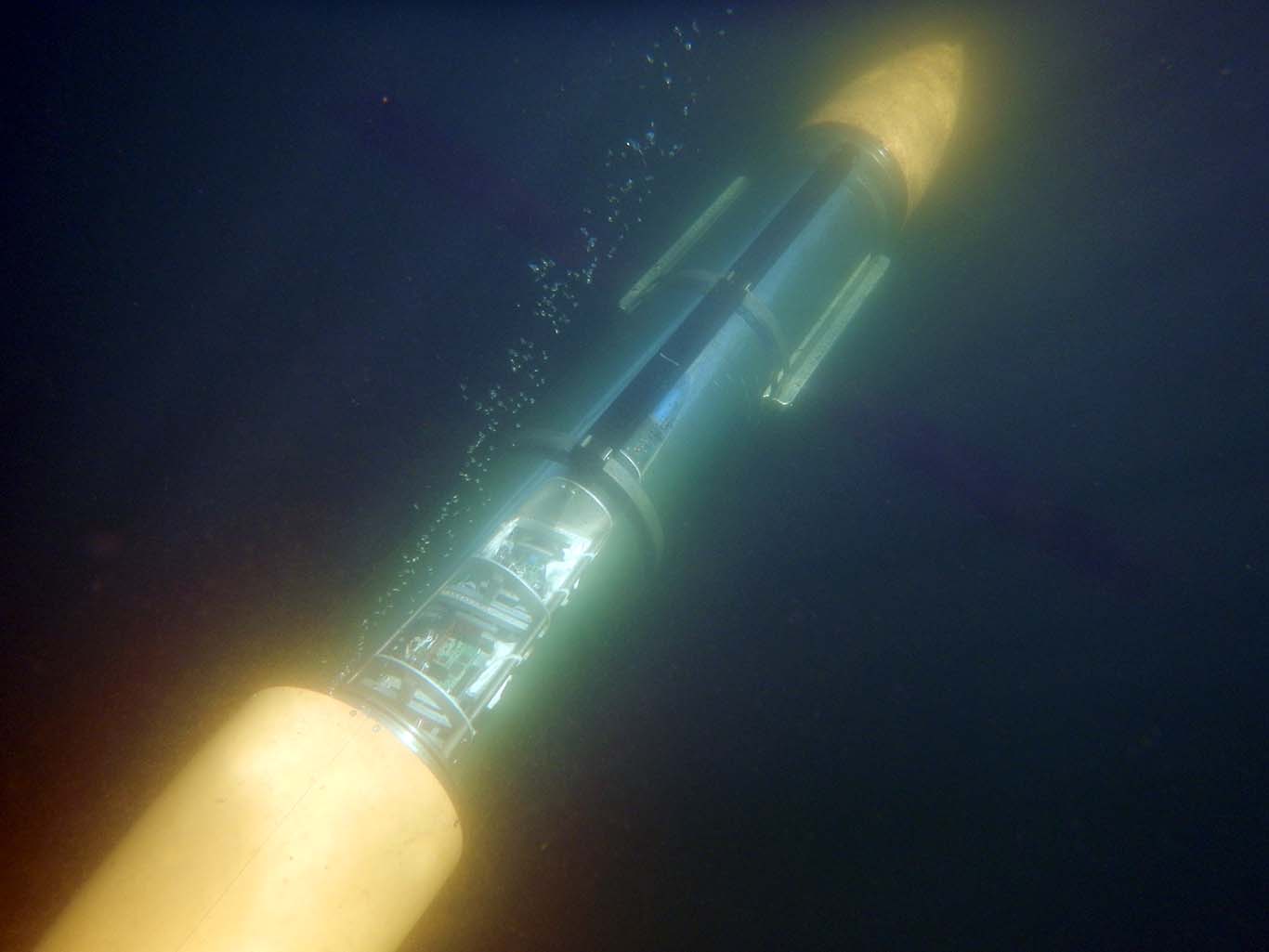
Имеющийся на сегодня экспериментальный образец МРТК глайдерного типа справился с решением опытно-исследовательской задачи по мониторингу радиационной обстановки в зоне условной аварии на атомном ледоколе в Мурманске во время учений МЧС России («Безопасная Арктика – 2023») в апреле 2023 г.
Читать статью в .pdf>>
Технологии интеллектуальной идентификации и кластеризации способны предоставлять необходимую информацию о месторасположении ППОО и точек возникновения и характере чрезвычайной ситуации, наличии пострадавших. Количество одновременно собираемых параметров позволяет применять нейросетевые подходы и методы машинного обучения для формирования логики внутригруппового взаимодействия и планирования как однородной, так и разнородной группы роботов.
Программно-имитационный комплекс на основе ROS, Rviz, Gazebo и библиотек машинного обучения моделирует сценарии применения МРТК в решении задач обнаружения, патрулирования и мониторинга ППОО с последующей программно-аппаратной отработкой и верификацией на имеющихся макетах мини катеров, автономных необитаемых подводных аппаратах и других образцах РТК.
Успех выполняемых работ обусловлен устойчивой связью между агентами МРТК. За связь и навигацию в подводной среде отвечает комбинированный гидроакустический модем с ультракороткой базой разработки и производства СПбГМТУ, в воздушной среде связь реализована через Wi-Fi и Lora каналы.
Имеющийся на сегодня экспериментальный образец МРТК глайдерного типа справился с решением опытно-исследовательской задачи по мониторингу радиационной обстановки в зоне условной аварии на атомном ледоколе в Мурманске во время учений МЧС России («Безопасная Арктика – 2023») в апреле 2023 г.
Читать статью в .pdf>>

