Две статьи из Лаборатории интеллектуальной космической робототехники (Центр системного проектирования Сколтеха) были приняты на Международную конференцию по беспилотным авиационным системам (IEEE ICUAS 2025), которая пройдет 14-17 мая в Шарлотте, штат Северная Каролина, США.
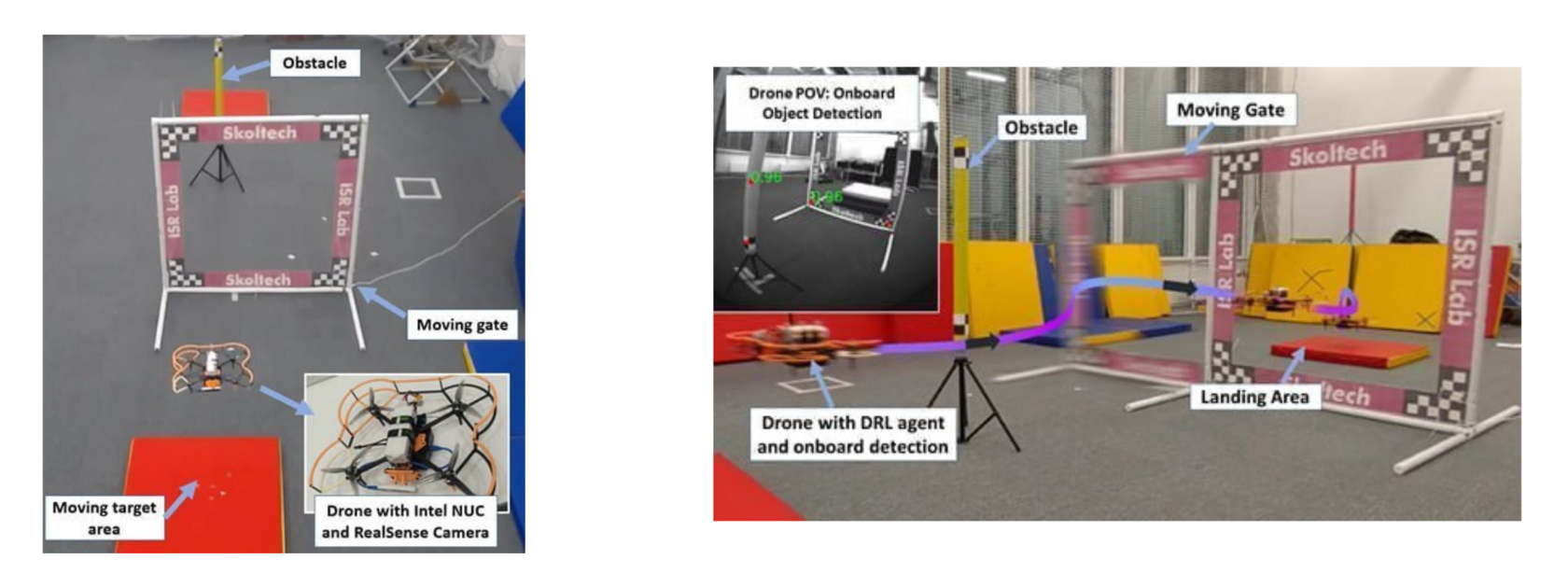
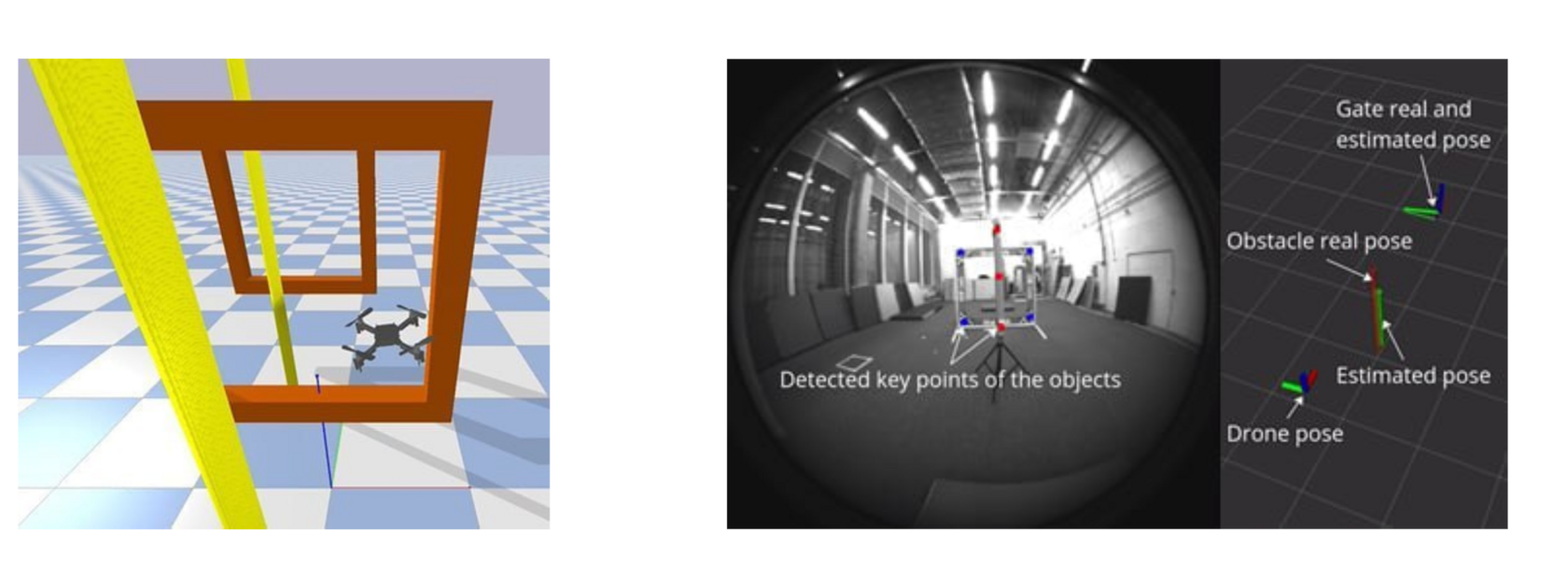
«AgilePilot: Дрон-агент с планированием движения в реальном времени на основе глубокого обучения с подкреплением (DRL) и обнаружения объектов для динамических сред»
Система AgilePilot помогает БЛА быстро и безопасно летать среди движущихся препятствий и меняющихся целей. Обычные методы часто не справляются с резкими изменениями среды, но AgilePilot использует искусственный интеллект и компьютерное зрение, что позволяет БЛА анализировать обстановку в реальном времени, предсказывать движение объектов и своевременно корректировать маршрут.
Статья выложена в открытый доступ по ссылке.
Система AgilePilot помогает БЛА быстро и безопасно летать среди движущихся препятствий и меняющихся целей. Обычные методы часто не справляются с резкими изменениями среды, но AgilePilot использует искусственный интеллект и компьютерное зрение, что позволяет БЛА анализировать обстановку в реальном времени, предсказывать движение объектов и своевременно корректировать маршрут.
Статья выложена в открытый доступ по ссылке.
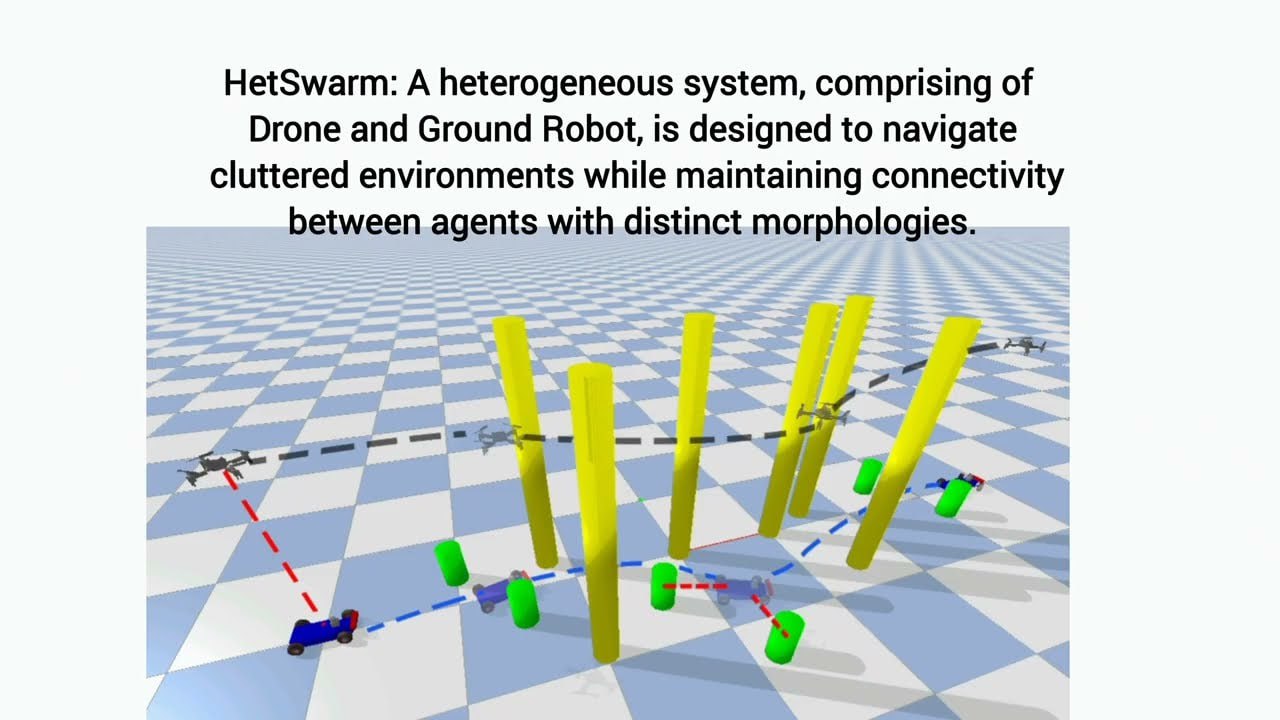
«HetSwarm: кооперативная навигация гетерогенного роя в динамических и загроможденных средах с помощью управления на основе импеданса»
HetSwarm — это система для совместной навигации группы разнородных роботов (дрона и мобильного робота) в сложных динамических условиях. Дрон строит маршрут в реальном времени, а наземный робот следует за ним, избегая препятствий с помощью виртуальных импедансных связей. Тесты на динамических моделях роботов в симуляторе показали 90% успешных проходов трасс со статичными и движущимися препятствиями, с отклонением робота от препятствий в среднем на 45 см.
Статья выложена в открытый доступ по ссылке.
HetSwarm — это система для совместной навигации группы разнородных роботов (дрона и мобильного робота) в сложных динамических условиях. Дрон строит маршрут в реальном времени, а наземный робот следует за ним, избегая препятствий с помощью виртуальных импедансных связей. Тесты на динамических моделях роботов в симуляторе показали 90% успешных проходов трасс со статичными и движущимися препятствиями, с отклонением робота от препятствий в среднем на 45 см.
Статья выложена в открытый доступ по ссылке.