Команда из лаборатории робототехники ETH Zurich, работающая с несколькими больницами в Швейцарии, разработала робота с магнитным управлением, который может быть использован для лечения людей после инсульта.
При ишемических инсультах сгусток крови или бляшка задерживается в крошечных сосудах головного мозга. В результате возникает закупорка, которая препятствует притоку крови к мозгу, убивая клетки. Такие инсульты могут вызвать повреждение головного мозга, а иногда и смерть. Их лечение чрезвычайно чувствительно ко времени: чем больше времени требуется на устранение блокировки, тем сильнее повреждение мозга.
Современные методы лечения включают лекарства, которые могут разбить бляшку, вызывающую закупорку, или использование проводника, вставленного в бедренную артерию и продвигаемого до тех пор, пока его кончик не достигнет закупорки. Оба метода лечения требуют времени, а это означает, что клетки мозга умирают, ожидая, пока кровь достигнет их.
Современные методы лечения включают лекарства, которые могут разбить бляшку, вызывающую закупорку, или использование проводника, вставленного в бедренную артерию и продвигаемого до тех пор, пока его кончик не достигнет закупорки. Оба метода лечения требуют времени, а это означает, что клетки мозга умирают, ожидая, пока кровь достигнет их.
В новой работе швейцарских робототехников предложила новый подход, который позволяет гораздо быстрее реагировать инсульт.
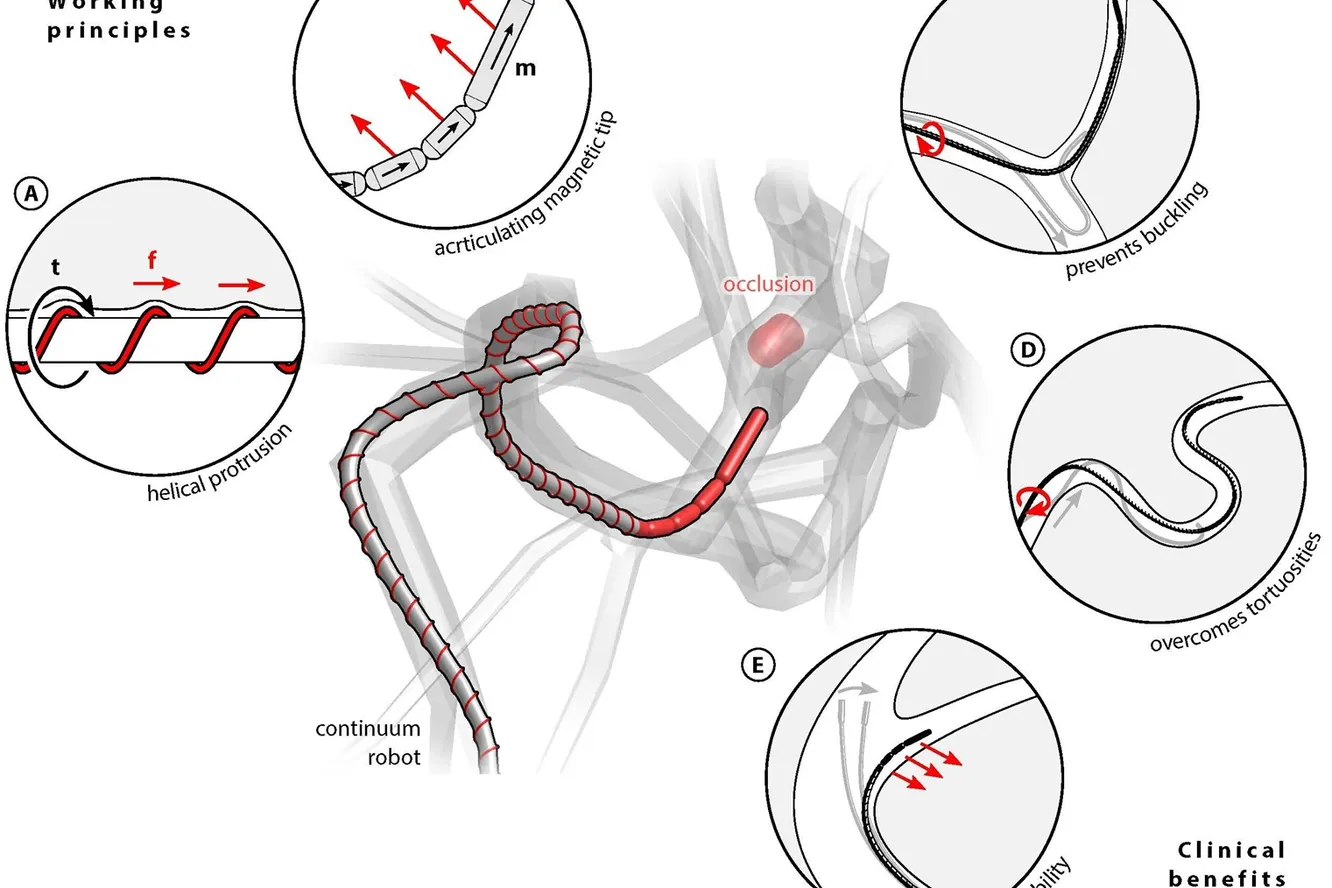
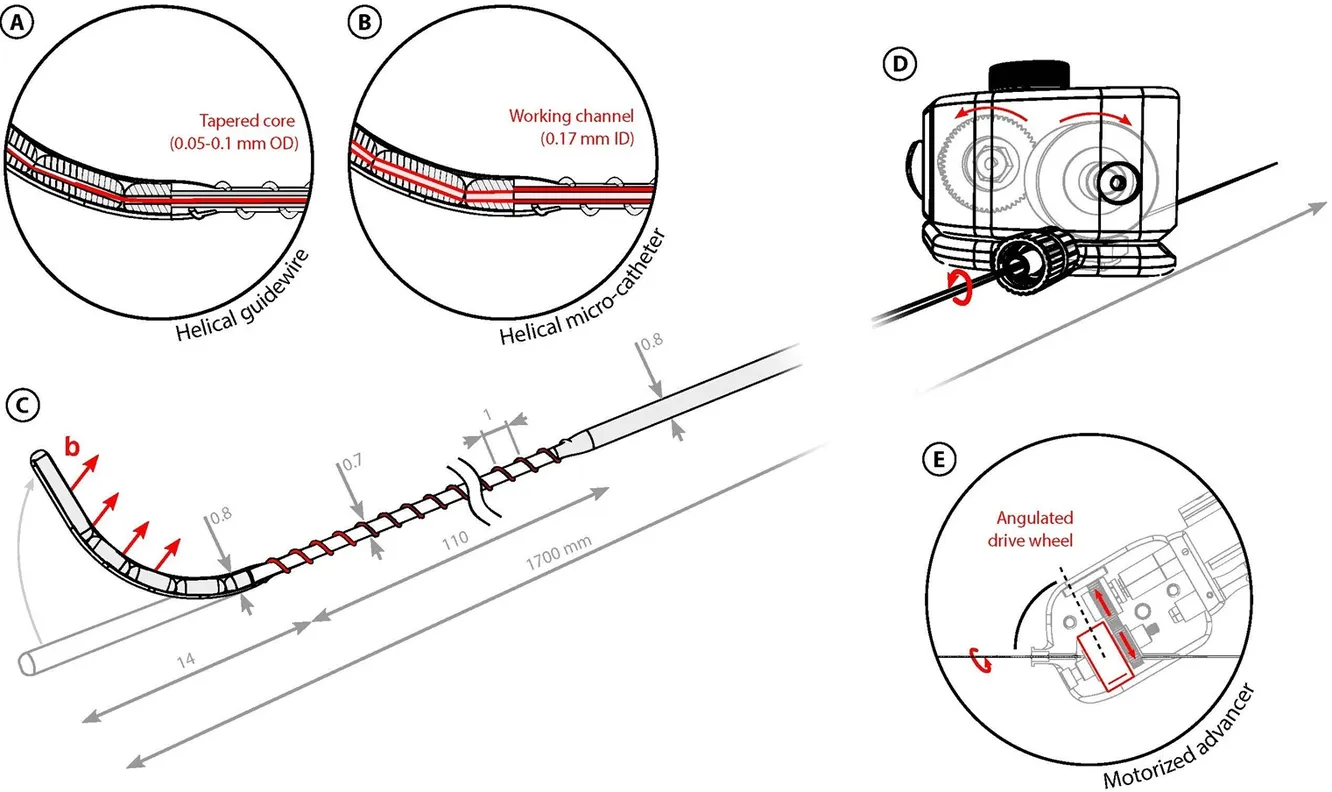
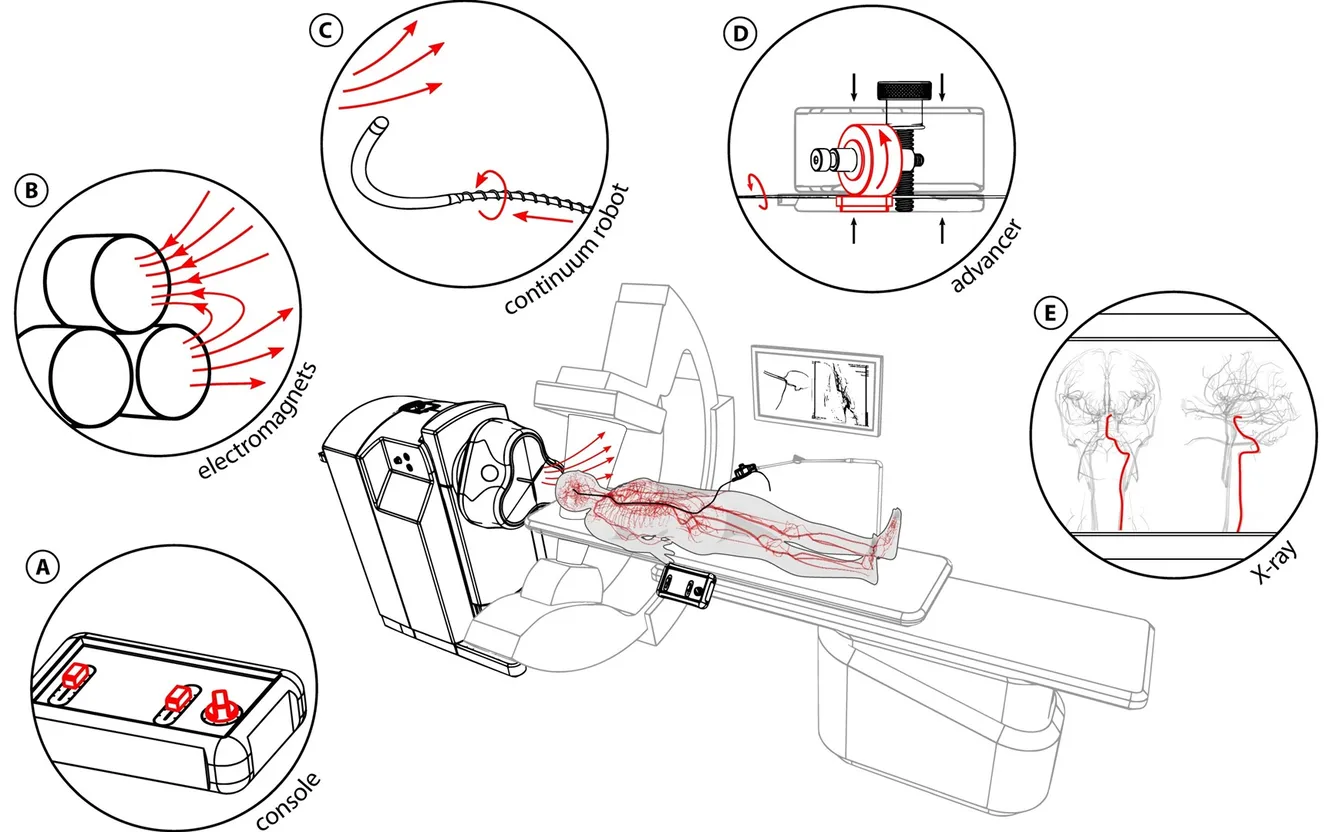
Команда разработала робота в форме винта, достаточно маленького, чтобы поместиться внутри тонких кровеносных сосудов. Применение внешнего магнита заставляет робота вращаться, продвигаясь вперед. Команда добавила мягкий наконечник в передней части робота, чтобы предотвратить повреждение кровеносных сосудов.
Команда полагает, что робота можно будет использовать для быстрого перемещения по кровеносным сосудам до тех пор, пока не будет достигнута закупорка. Причем его можно ввести гораздо ближе к мозгу. Достигнув закупорки, робот просверлит бляшку, и кровь снова пойдет по сосуду.
Команда разработала робота в форме винта, достаточно маленького, чтобы поместиться внутри тонких кровеносных сосудов. Применение внешнего магнита заставляет робота вращаться, продвигаясь вперед. Команда добавила мягкий наконечник в передней части робота, чтобы предотвратить повреждение кровеносных сосудов.
Команда полагает, что робота можно будет использовать для быстрого перемещения по кровеносным сосудам до тех пор, пока не будет достигнута закупорка. Причем его можно ввести гораздо ближе к мозгу. Достигнув закупорки, робот просверлит бляшку, и кровь снова пойдет по сосуду.
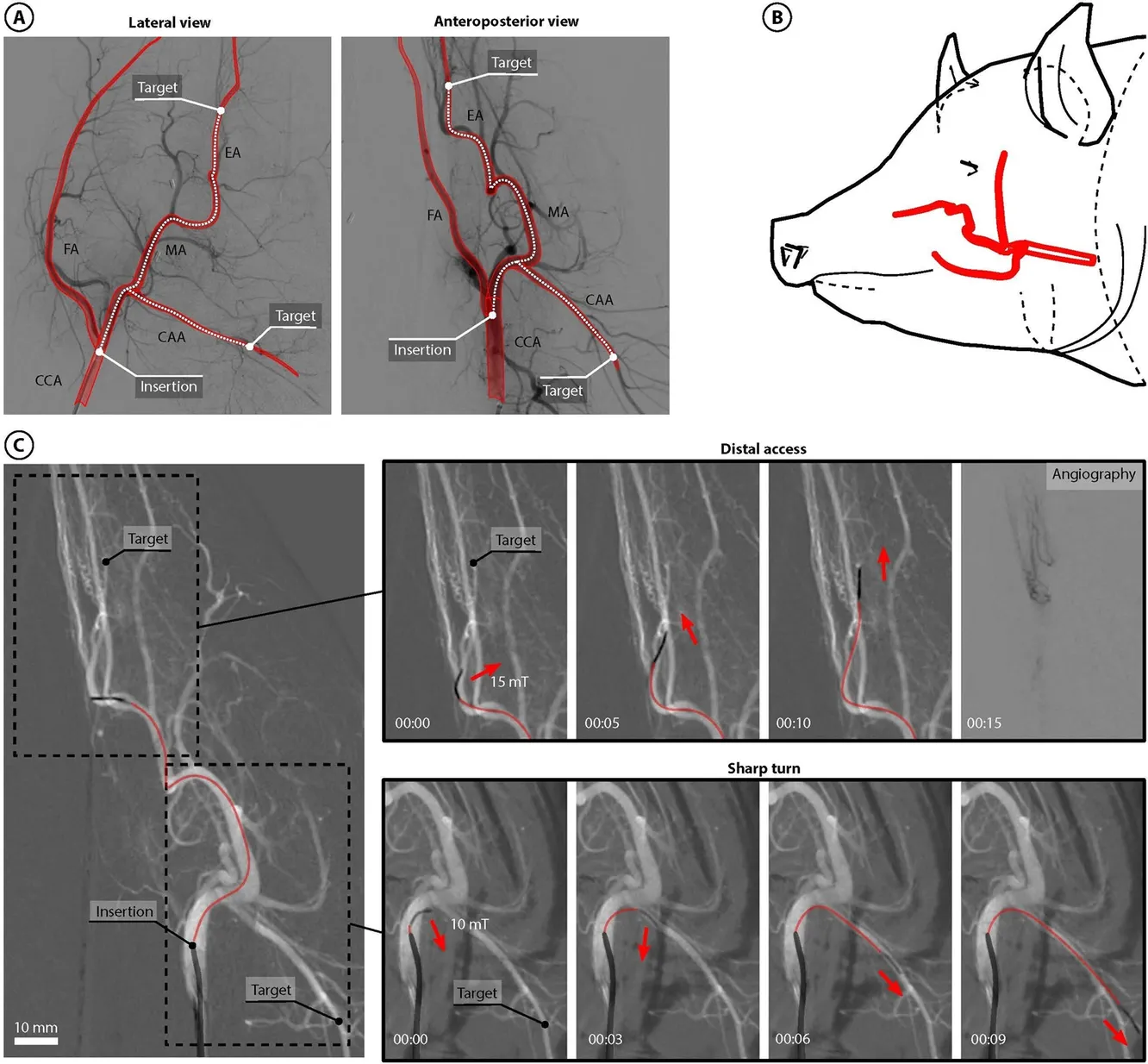
На данный момент команда протестировала своего робота на кремниевых моделях, человеческой плаценте в своей лаборатории и на живой свинье. Робот показал себя достаточно хорошо, чтобы продолжить испытания чтобы начать лечение пациентов-людей в самом ближайшем будущем.

