В Гонконге представили технологию, которая радикально меняет подход к передвижению четвероногих роботов по сложной местности. Новая разработка позволяет машинам действовать почти как живые животные — автономно, гибко и точно, преодолевая препятствия, которые ранее считались непреодолимыми. Роботы теперь способны находить обходные маршруты там, где визуально путь кажется закрытым.
Робот вместо человека в опасных условиях
Механические платформы демонстрируют поведенческие паттерны, которые можно сравнить с инстинктами биологических организмов. Они адаптируются к разнообразным типам рельефа, что открывает совершенно новые возможности для применения в высокорисковых средах.
Такие роботы могут выполнять задачи, смертельно опасные для человека. Один из ключевых сценариев — мониторинг нестабильных завалов после землетрясений, где любое неверное движение может вызвать повторный обвал. Долгое время именно неспособность роботов корректно анализировать и идентифицировать препятствия ограничивала их эффективность. Новая технология решает эту проблему системно.
Многослойная карта местности
Революционное решение разработано командой Гонконгского университета под руководством доцента Пэна Лу и аспиранта Йеке Чэнь. Вместо традиционного плоского картографирования учёные предложили многослойную 3D-модель рельефа.
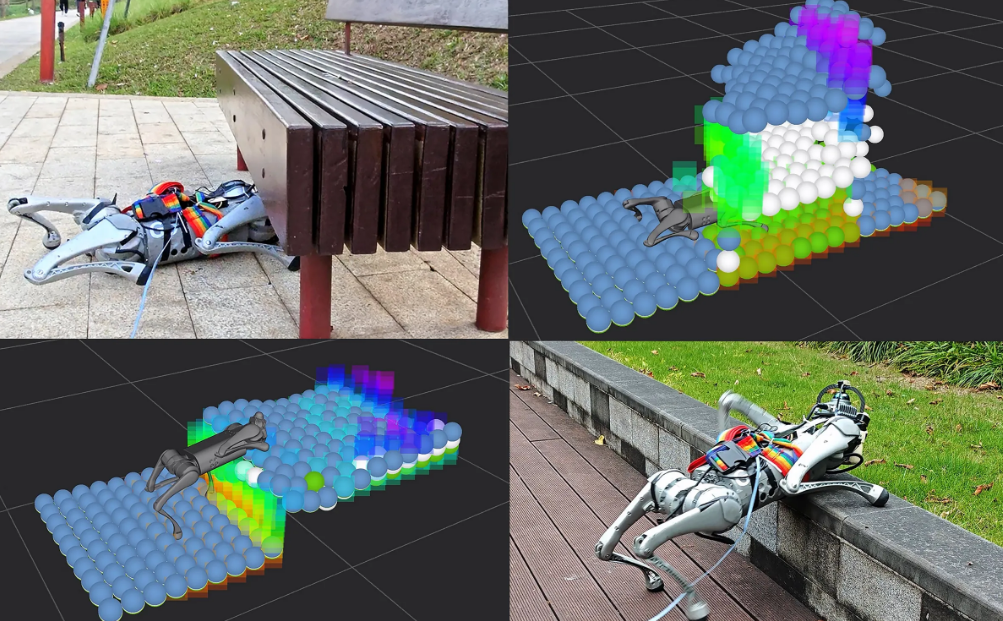
Такая архитектура формирует объемное представление пространства и позволяет системе «понимать» структуру окружающей среды. Каждый слой отвечает за тип препятствия — будь то глубокий разрыв, который нужно перепрыгнуть, или узкий коридор с выступами, под которыми требуется проползти. Робот получает не просто визуальные данные, а структурное описание ситуации, что даёт ему возможность отличать преодолимые зоны от критически опасных.
Как лидар помогает роботам «видеть» мир
Ключевой технологией выступает лидар (LiDAR) — система лазерного сканирования, позволяющая измерять расстояния с высокой точностью. По принципу, схожему с эхолокацией, устройство испускает множество лазерных импульсов и фиксирует время их возврата.
Лидар формирует динамическую трёхмерную карту и предоставляет роботу данные о глубине, форме и деталях каждого препятствия. В условиях разрушений и завалов это критично: визуальной информации камер недостаточно, тогда как лидар даёт полноценное «осязание» пространства.
Обучение в симуляторе
Перед тем как выйти в реальную среду, робот прошёл масштабную подготовку в виртуальных симуляциях. Исследователи моделировали сотни сценариев движения: ползание, прыжки, карабканье и переключение между этими режимами.
По словам Пэна Лу, обобщение опыта, полученного в симуляторе, позволяет роботу выбирать наиболее подходящий способ преодоления препятствия в зависимости от контекста. Кроме того, если сенсорных данных в реальности недостаточно, система заполняет пробелы, опираясь на опыт, приобретённый в виртуальной среде.
От симуляции к реальному миру
Эксперименты на реальных полигонах подтвердили работоспособность модели. В помещениях и на улице робот Unitree Go1 демонстрировал уверенную автономную навигацию: проползал под конструкциями, перепрыгивал преграды и находил безопасные маршруты.
Особенно примечательно, что возможность самостоятельного поиска обходного пути в технологии не была явно заложена. Однако при столкновении с непреодолимой высотой робот начинал анализировать окружение и методом проб находил альтернативный вектор движения. Это показало элементы зарождающегося автономного поведения.
Коммерция и существующие ограничения
Несмотря на мощный прорыв, разработка пока ограничена зависимостью от данных симуляционного обучения — робот не обучается непосредственно в реальном мире. Тем не менее команда уже работает над интеграцией реальных данных в процесс подготовки моделей.
Учёные планируют коммерциализировать технологию для задач автоматизированного мониторинга на строительных площадках и в других сферах, где требуется автономная работа в сложных условиях. Дальнейшее развитие может привести к созданию роботов, способных уверенно двигаться по любой поверхности и в любых сценариях.

