одно из подразделений голландской компании, специализирующейся на ремонте газотурбинных двигателей.
ОТРАСЛЬ:
машиностроение.
ЗАДАЧА:
убрать технолога-программиста из опасной среды роботизированной ячейки за счёт внедрения CAM-решения для дистанционного программирования ячейки.
ЦЕЛЬ:
нанесение покрытий на лопатки газотурбинных двигателей с применением робота ABB.
РАЗРАБОТЧИК РЕШЕНИЯ:
Кравченко Константин, Кандидат технических наук.
Ведущий инженер технической поддержки.
ОБОРУДОВАНИЕ/ПО:
Autodesk PowerMILL Robot.
ОПИСАНИЕ:
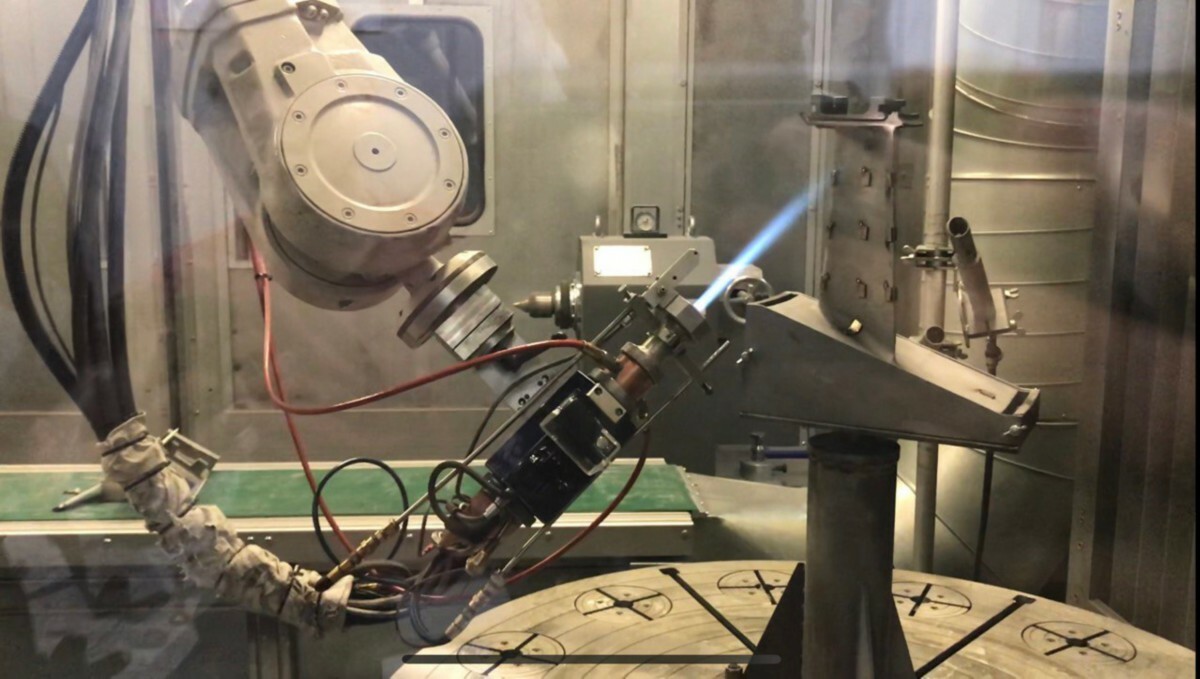
Безусловно, логично проникновение роботизации в области производства, сопряженные с опасными условиями труда, когда требуется убрать человека из опасной среды и заменить его машиной. Например, одно из подразделений компании, специализирующейся на ремонте газотурбинных двигателей, столкнулось с задачей нанесения покрытий на лопатки газотурбинных двигателей (рис.3.1) с применением робота ABB. Камера, в которой выполняется процесс нанесения покрытий, оснащена мощной вытяжкой, но тем не менее, в воздухе всегда находятся частицы порошка, что представляет угрозу здоровью человека при длительном нахождении в камере без средств индивидуальной защиты. В таких условиях создание программ методом обучения затруднено.
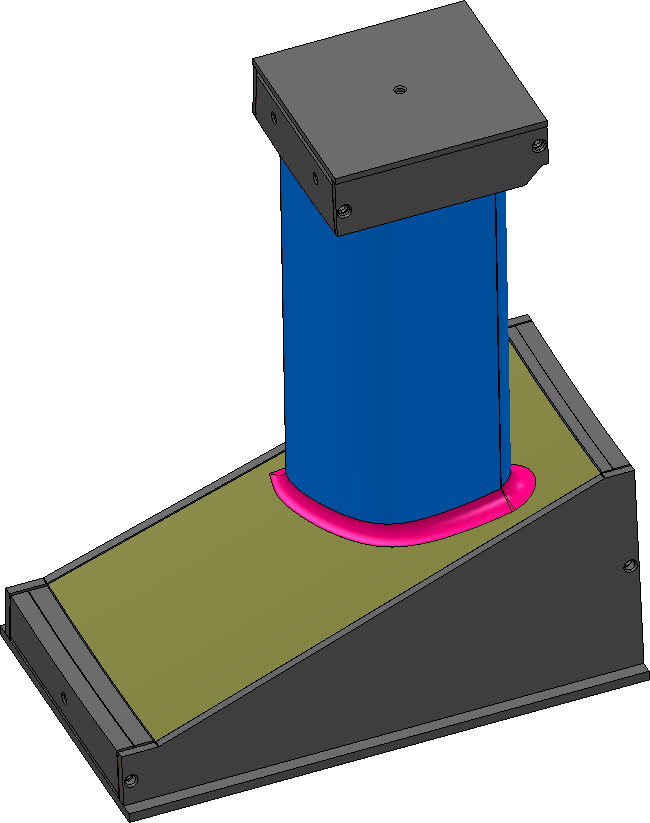
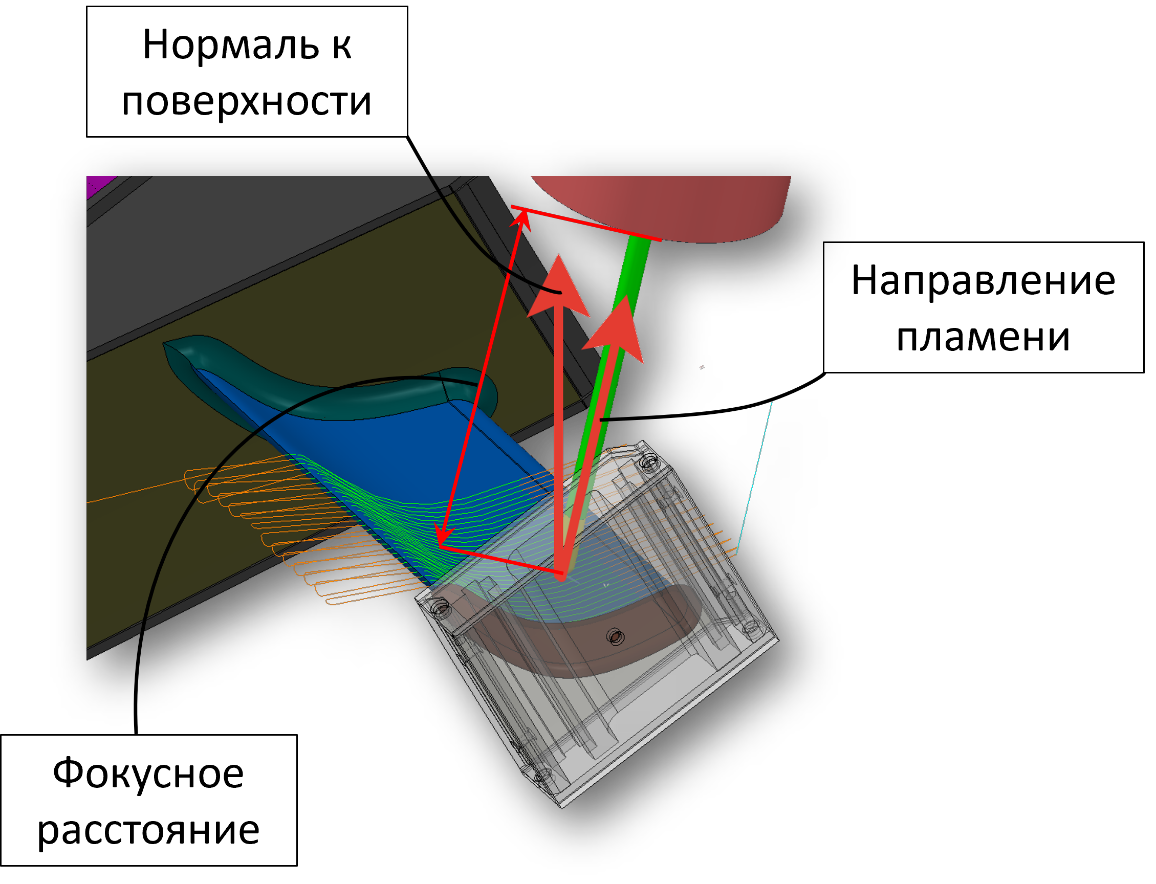
Также существенную проблему представляет геометрия изделия. При создании программы методом обучения выдержать постоянные параметры операции (рис.3.2) - фокусное расстояние, постоянная ориентация пламени относительно поверхности, постоянная скорость перемещения пламени относительно поверхности – фактически нереально. Фокусное расстояние влияет на температуру частицы во время контакта с поверхностью. Значение должно быть постоянным. Угол между пламенем и поверхностью влияет на расход материала. Чем больше угол между осью пламени и нормалью к поверхности, тем больше расход порошка. Кроме того, существует предельное допустимое значение угла, при превышении которого порошок перестает прилипать к поверхности. В ходе обработки угол должен быть постоянным. Скорость перемещения пламени относительно поверхности влияет на микроструктуру покрытия. Скорость перемещения пламени по поверхности должна быть постоянным для обеспечения равномерности слоя покрытия. Следствием неэффективной траектории является повышение коэффициента использования материала (КИМ), то есть возрастает расход порошка. Напомним, что использованный порошок не пригоден для повторного применения.
РЕЗУЛЬТАТ:
Результатом внедрения CAM-решения, которое включало в себя постпроцессор и цифровую модель роботизированной ячейки, стало не только снижение КИМ и повышение производительности операции, но и значительное сокращение времени пребывания инженера в опасной среде за счет дистанционного программирования ячейки.
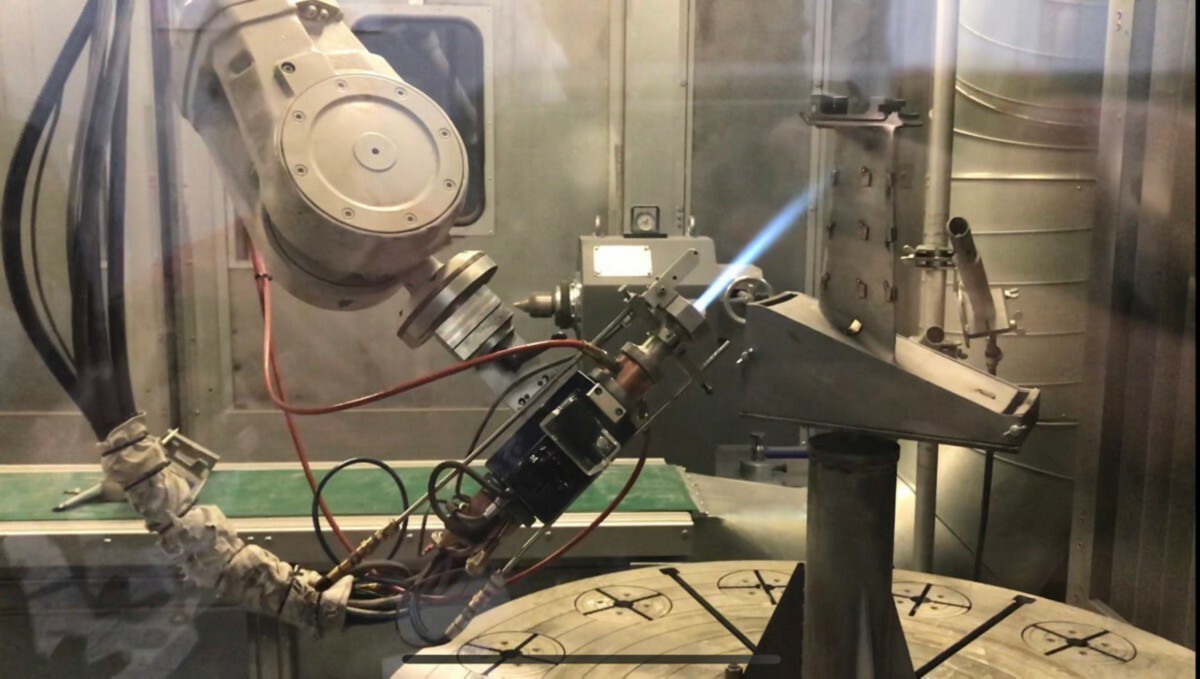
На примере ниже рассмотрим решение одного из технологических требований при нанесении покрытий – в ходе операции пламя всегда должно быть направлено в сторону вытяжки (на фотографии на рис. 3.3 вытяжка расположена напротив робота справа). То есть в ходе обработки робот и внешний двухосевой позиционер должны так «играть осями», чтобы вектор пламени оставался постоянным. При создании программы методом Touch-Up это требование выдержать крайне сложно, потребуется много часов кропотливой работы по обучению робота. В среде CAM уже предусмотрены инструменты для управления векторами рабочего устройства, в частности, можно фиксировать ось пламени в заданном направлении (рис.3.4).
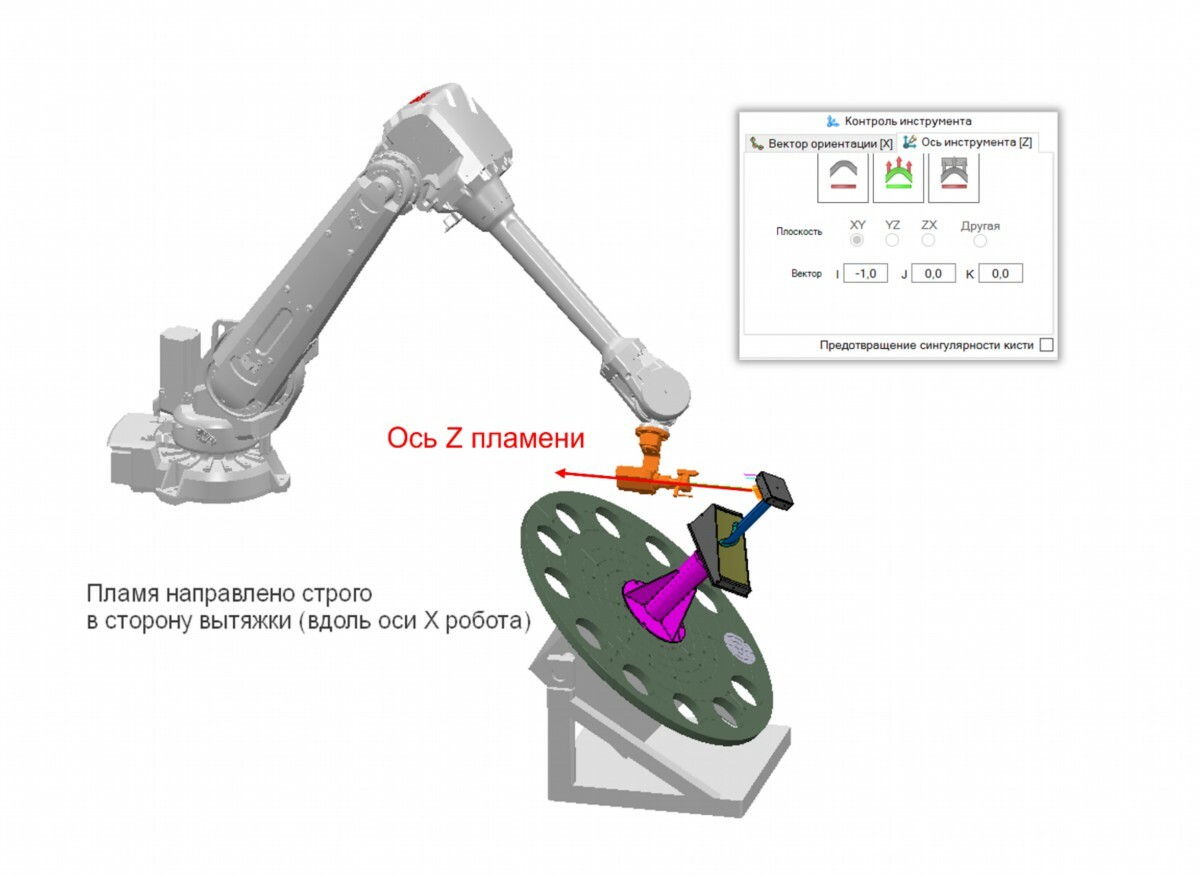
Наличие таких инструментов, как управление векторами рабочего органа, является обязательным условием применимости той или иной CAM-системы для программирования роботов. В то же время существует ряд инструментов, не являющихся обязательными, но существование которых значительно расширяет область применение конкретной CAM-системы.