совместное предприятие Россия-США.
ОТРАСЛЬ:
строительство, машиностроение.
ЗАДАЧА:
симуляции и поиск столкновений при одновременной работе двух
промышленных роботов в одной ячейке.
ЦЕЛЬ:
разработать плагин для автоматической синхронизации операций для роботов,
работающих в одной ячейке.
РАЗРАБОТЧИК РЕШЕНИЯ:
Кравченко Константин, Кандидат технических наук
Ведущий инженер технической поддержки.
ОБОРУДОВАНИЕ/ПО:
Autodesk PowerMILL Robot.
ОПИСАНИЕ:
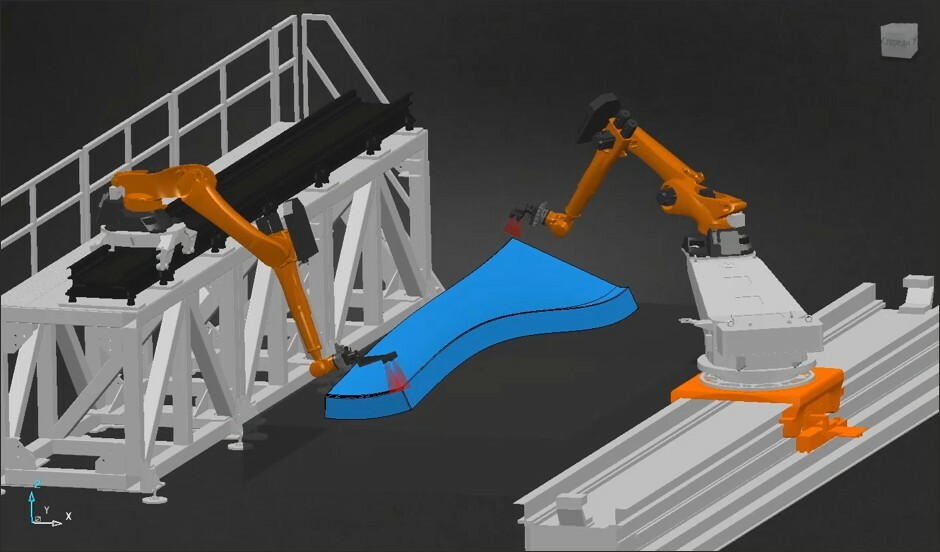
На рис. 2.1 представлен проект симуляции работы двух роботов,
выполняющих сканирование.

Сканирование – это также одна из нетиповых задач для промышленных роботов. В
представленном на рис.2.1 кейсе наш специалист разработал постпроцессор и модель
ячейки двух роботов для программирования операций сканирования. Помимо двух 6-
тиосевых роботов в ячейке также задействованы дополнительные оси – линейный трек
для мастер-робота, поворотная консоль и линейный трек для подчиненного робота.
РЕЗУЛЬТАТ:
разработанное решение позволяет визуализировать параллельную работу
двух роботов и обнаружить столкновения.