
Разработчик:
ГК ПЛМ Урал
Для одного из предприятий Республики Башкортостан были разработаны и внедрены постпроцессор, кинематическая модель и драйвер симуляции по G-кодам для станка Mazak QT-COMPACT-300. В данном оборудовании сочетаются возможности токарной, фрезерной и сверлильной обработки приводным инструментом, а также возможность автоматического перехвата детали и обработки детали на противошпинделе.
ГК ПЛМ Урал
Для одного из предприятий Республики Башкортостан были разработаны и внедрены постпроцессор, кинематическая модель и драйвер симуляции по G-кодам для станка Mazak QT-COMPACT-300. В данном оборудовании сочетаются возможности токарной, фрезерной и сверлильной обработки приводным инструментом, а также возможность автоматического перехвата детали и обработки детали на противошпинделе.

Станок оснащен возможностью установки приводных блоков для фрезерования и сверления нецентровых отверстий (вдоль осей X и Z). Для решения токарных задач станок комплектуется статическими блоками. Для более реалистичной симуляции обработки в кинематической модели станка были применены реальные 3D-модели патронов и кулачков фирмы Kitagawa.
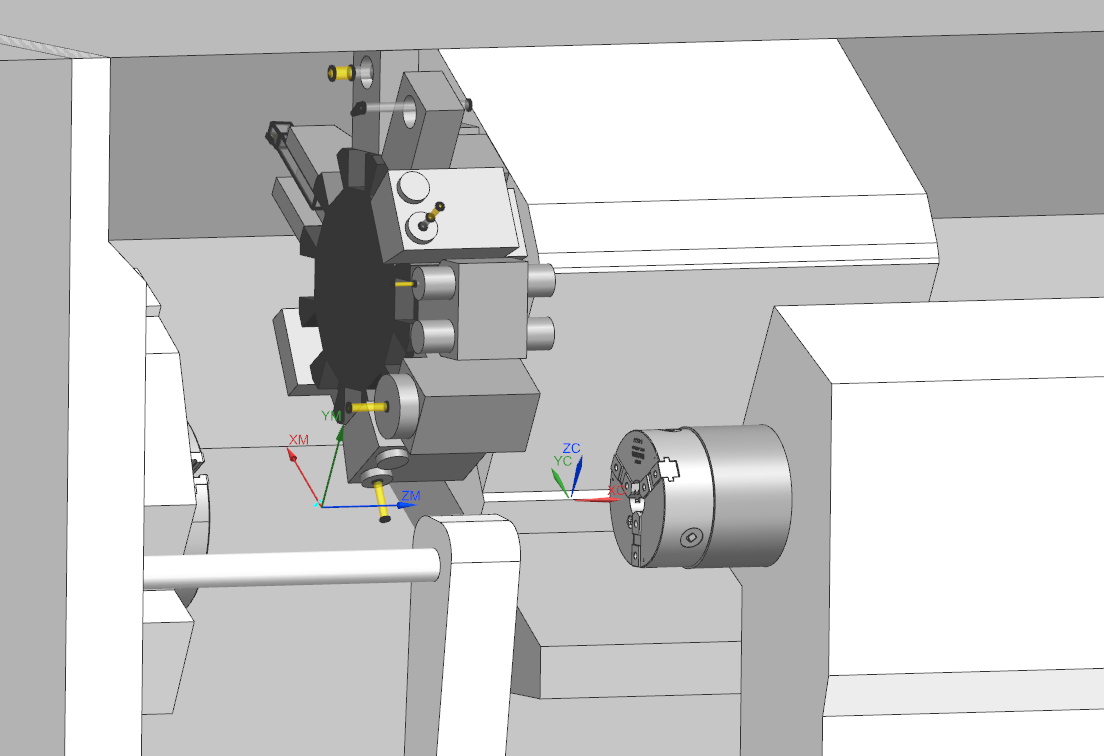
Помимо стандартных токарных, фрезерных и сверлильных функций и циклов, станок может осуществлять различные манипуляции с противошпинделем. Например, перехват заготовки из одного шпинделя в другой:
Данные задачи были успешно реализованы в постпроцессоре и кинематической модели станка. Пользователь имеет возможность заранее убедиться в безопасности созданных им траекторий обработки, благодаря отлаженному драйверу симуляции по G-кодам и кинематической модели с детально прорисованными револьвером, патроном, кулачками, противошпинделем, токарными и приводными блоками. В случае же возникновения потенциальных столкновений между станком / блоками / инструментом / заготовкой, NX CAM автоматически сообщит об этом технологу и покажет проблемные участки траектории. Работу кинематической модели можно увидеть на видео ниже.
- N90 (TRANSFER MAIN-SUB START)
- N100 G28 U0 V0
- N110 G28 W0
- N120 M306 (Open Sub chuck)
- N130 G04 X1.
- N140 M901
- N150 M212
- N160 M202
- N170 G97 S250 M03
- N180 M511 (Sync spindles ON)
- N190 M500 (Disconnection of locking chuck ON)
- N200 M540 (TRS-CHK mode On)
- N210 G00 B-490.0 (First approach)
- N220 G01 G94 B-518.5 F500.0 (Second approach)
- N230 M508 (Pressing start)
- N240 G31 B-520.0 F200.0
- N250 M509 (Pressing end)
- N260 M501 (Disconnection of locking chuck OFF)
- N270 M307 (Close Sub chuck)
- N280 G04 X1.
- N290 M206 (Open Main chuck)
- N300 G04 X1.
- N310 M513 (Sync spindles OFF)
- N320 M05
- N330 G00 B0. (Sub home)
- N340 M541 (TRS-CHK mode Off)
- N350 M212
- N360 M202
- N370 M312
- N380 M302
- N390 (TRANSFER MAIN-SUB END)
Данные задачи были успешно реализованы в постпроцессоре и кинематической модели станка. Пользователь имеет возможность заранее убедиться в безопасности созданных им траекторий обработки, благодаря отлаженному драйверу симуляции по G-кодам и кинематической модели с детально прорисованными револьвером, патроном, кулачками, противошпинделем, токарными и приводными блоками. В случае же возникновения потенциальных столкновений между станком / блоками / инструментом / заготовкой, NX CAM автоматически сообщит об этом технологу и покажет проблемные участки траектории. Работу кинематической модели можно увидеть на видео ниже.